
 府庁の組織から探す
府庁の組織から探す
























更新日:2023年10月19日



ロボテックオートメーション科の紹介動画

↑画像をクリックしてください
|
|
|---|---|
|
|



ロボテックオートメーション科は、自動制御技術者としての素養を学ぶための訓練を行っています。
多種多様な製品を生産する現場では、自動制御の知識・技術がたくさん使われています。
身近な製品をつくる担い手として、この世界に飛び込んでみませんか。
ロボテックオートメーション科について
 訓練の概要仕上がり像総訓練時間1年間の訓練の流れについて訓練の内容訓練に関する職種と仕事内容 訓練の概要仕上がり像総訓練時間1年間の訓練の流れについて訓練の内容訓練に関する職種と仕事内容 訓練により就職可能な仕事 訓練により就職可能な仕事 受講生の入校前の職種と修了後に就職した職種の例 受講生の入校前の職種と修了後に就職した職種の例 任意に取得可能な資格就職率修了生の主な就職先授業風景 企業見学ほか 任意に取得可能な資格就職率修了生の主な就職先授業風景 企業見学ほか |
|
訓練の概要
自動車、飲料水、お菓子、くすりなど多種多様な製品はそれぞれの生産工場でつくられています。
その工場では、産業ロボットやコンベアなどが使われており、それらは「自動」で動いています。
そして、動かすタイミングや動作の仕方は、プログラム等で「制御」されています。このような
「自動制御」という技術によって、毎日の生活に欠かせないものがつくられています。
自動制御を主体とする生産現場では、ここ数年増産体制に入っている企業が増えています。
そのため、産業ロボットや自動機器の制御プログラマー、オペレータや機械の保守ができる人材が必要とされています。
ロボテックオートメーション科では、自動制御技術に必要な基本技術・応用技術を学び、
自動制御のエンジニアを必要とする企業への就職を目指します。
仕上がり像
- リレーシーケンス回路の基礎から、タイマー制御・インバータ制御配線ができる。
- PLC(Programmable logic controller)による生産システムの設計ができる。
- 小規模なPlc制御システムにおいて、客先との仕様打ち合わせができる。
- 生産設備の製作及び保守・改善ができる。
- 6軸ロボットとPlcとの通信制御による、システム設計ができる。
総訓練時間
- 1400時間
1年間の訓練の流れ
自動制御について、まったく知らない方を対象としているため、基礎の基礎から1年かけてじっくり学びます。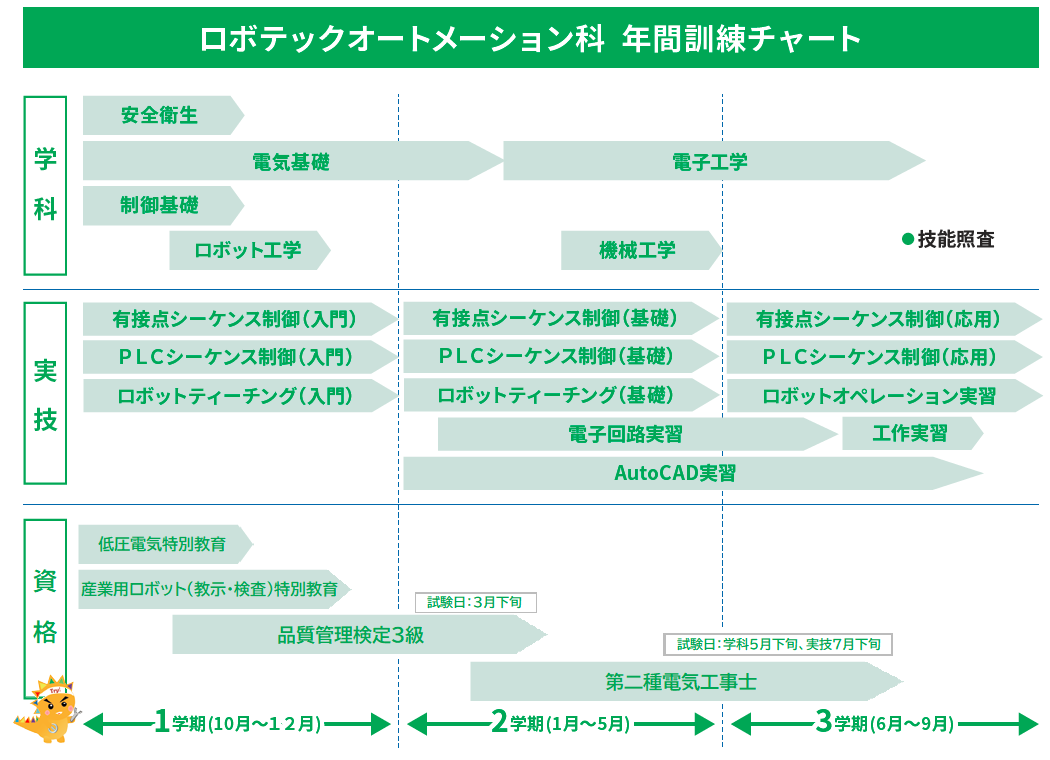
訓練の内容
1.有接点シーケンス回路実習(基礎)
2.有接点シーケンス回路実習(応用)
3.PLC(Programmable logic controller) (基礎)
4.PLC(Programmable logic controller) (応用)
5.ロボットティーチング実習(基礎)
6.ロボットオペレーション実習(応用)
7.電子回路組立実習および測定実習
8.ACサーボモータ制御実習/パルスモータ制御実習
9.自動システム設計のグループワーク実習
10.CAD基本実習
11.応用実習
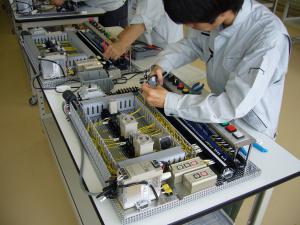
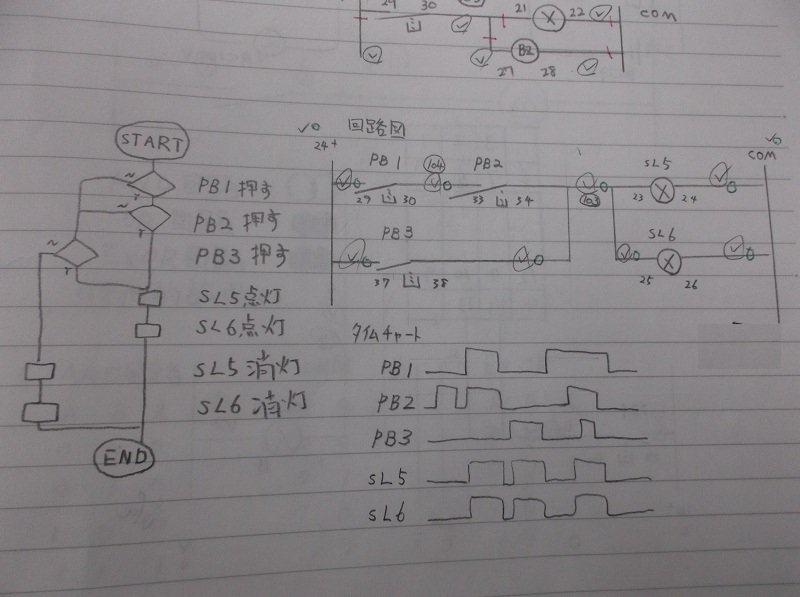
1.有接点シーケンス回路実習(基礎)
シーケンスとは、ある決められた順序に従って制御を行うという意味です。
有接点シーケンスは、リレーシーケンスともいい、電磁接触器などの制御機器を用いて、電線により制御回路を完成させます。
 |  |  | |  |
|---|---|---|---|---|
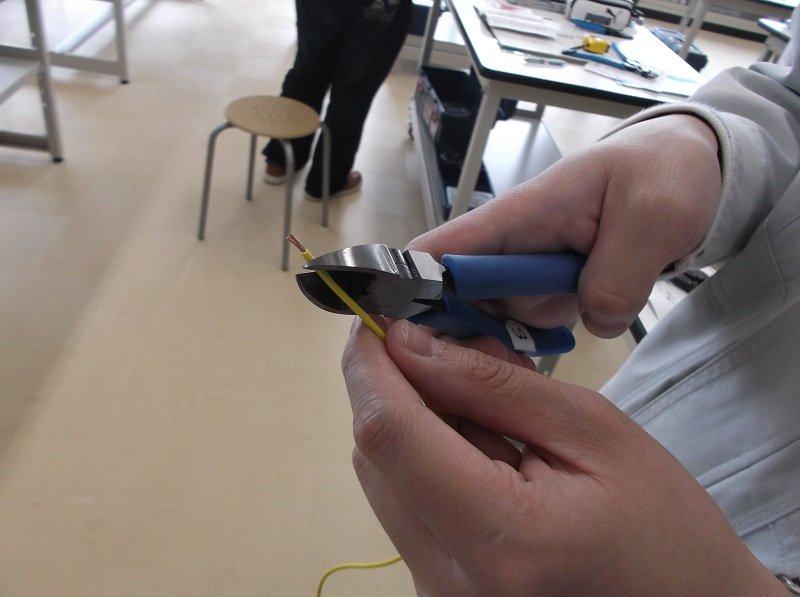
シーケンス回路を作成する前に、フローチャートやタイムチャートを記入し回路図をしっかり書けるよう準備します。フローチャートとは制御を行う手順を表すもので、回路を作成するための設計図となります。 | 回路図を元に配線作業を行います。工具の使い方から学び、配線間違いの無いように1本1本の作業に対して必ずチェックを行います。 | 配線作業が完了しますと、まず自分で回路のチェックを行います。その後、他の人にチェックをしてもらいます。このような作業をすることで相手の間違いを見つけ、生産管理の勉強に繋がります。 |
 |
|  |
| |||
|---|---|---|---|---|---|---|
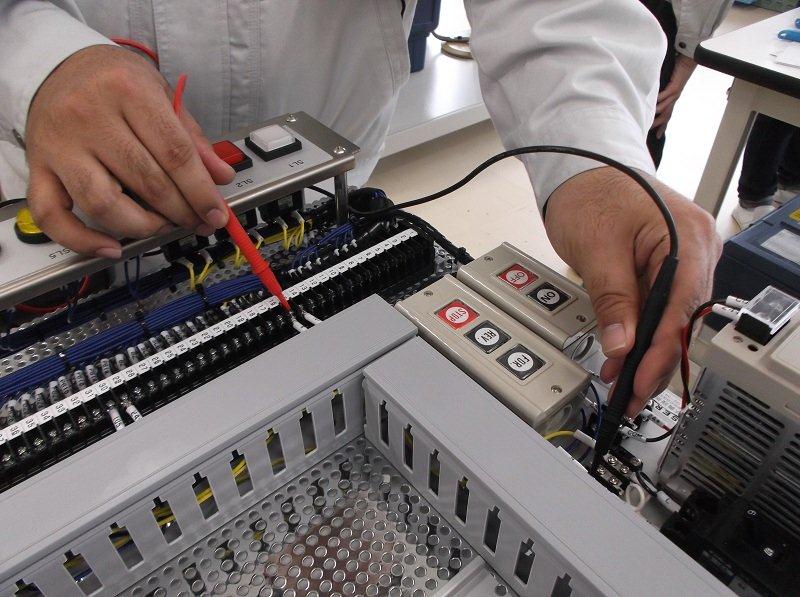
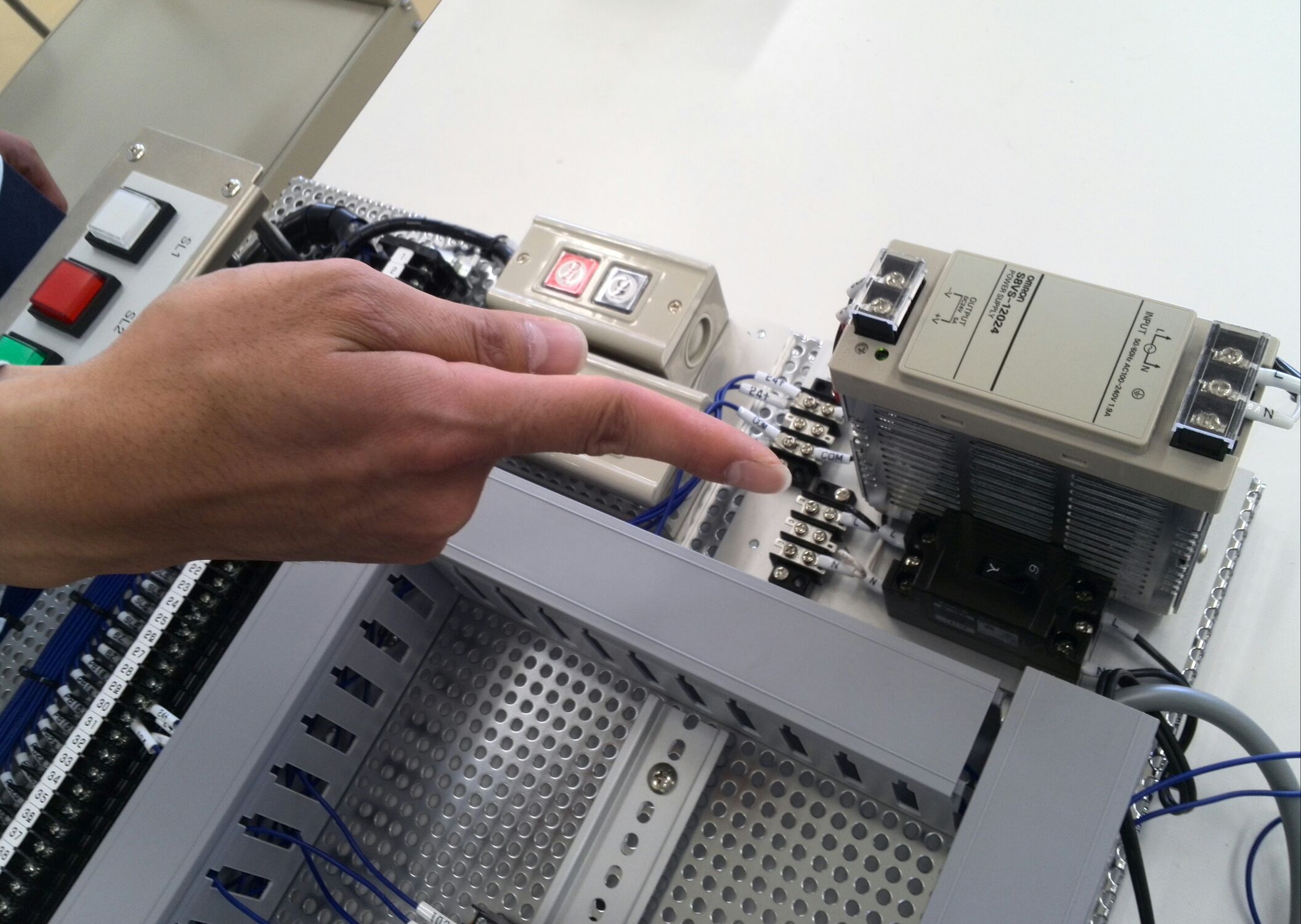
回路の確認が済むと、いよいよ電源を投入し動作の確認を行います!このとき、しっかりと指差し呼称を行い、安全の確保をします。 | 無事、仕様どおりに回路を動かすことが出来ました!このような流れで、自動制御の基本となる回路動作を学んでいきます。 |

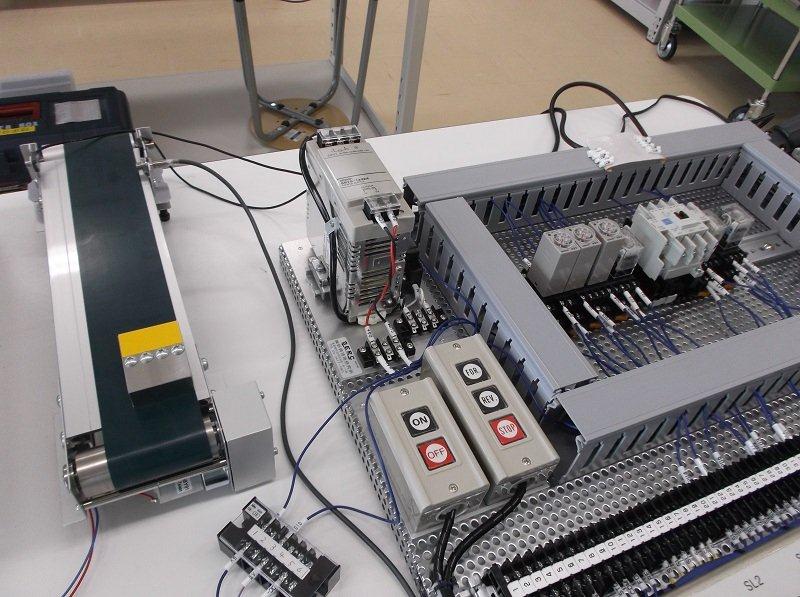
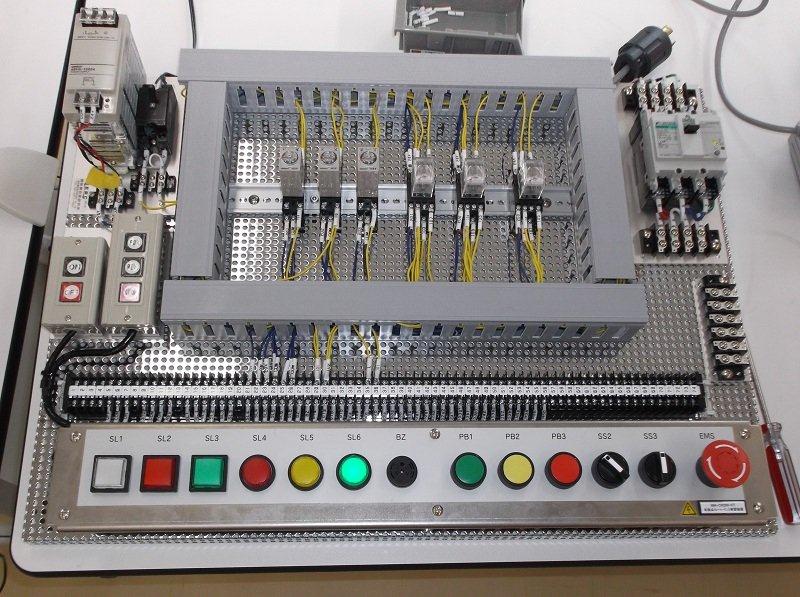
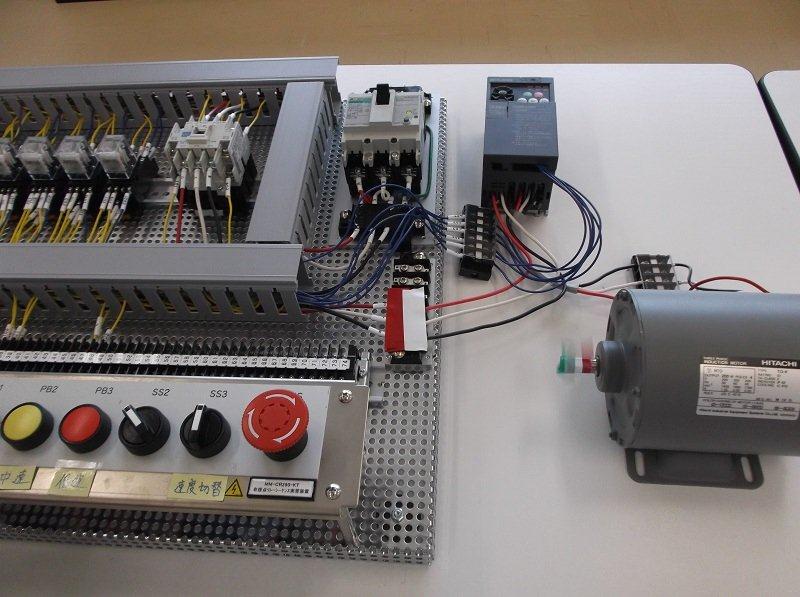
2.有接点シーケンス回路実習(応用)
電磁接触器を用いた、三相誘導電動機の制御やインバータを用いた速度制御などの応用実習を行っています。
 | |  |
|---|---|---|
身近な信号機を題材とした、タイマー回路の実習です。 | インバータにより三相モータの速度制御をする回路です。 |
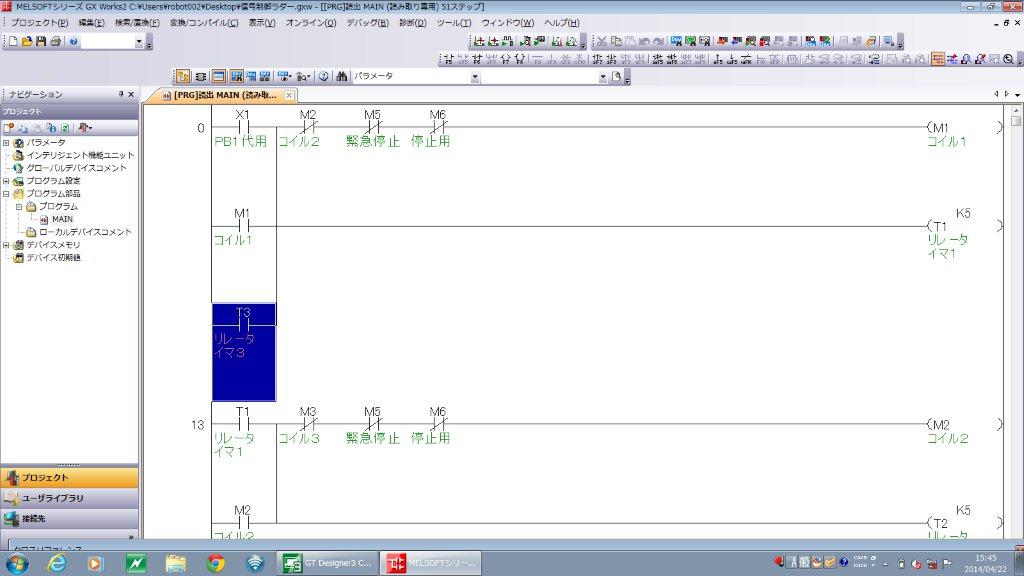
3.PLC(Programmable logic controller)(基礎)
PLCとはプログラマブルロジックコントローラといい、自動制御専用のコンピュータにパソコンでプログラミングした回路を転送します。
それを実行することにより、制御対象を自動制御する装置のことです。
コイルやタイマリレーなどの制御回路をパソコンにより作成したプログラムで実行させます。
本校では、企業内講習用の入門テキストや、e−ラーニングを使用し、基礎から使い方を学びます。
 |
|  |
|---|---|---|
パソコンで専用アプリの”シーケンス作成ソフト”を立ち上げてプログラムの基礎を学びます。 | プログラムをデバッグして修正し、実際の機器が設計どおりに動くか、確認します。 |
4.PLC(Programmable logic controller)(応用)
タッチパネル、省配線システム(CC−Link)、イーサネット(Ethernet)通信など、生産現場で必要な応用技術を習得します。
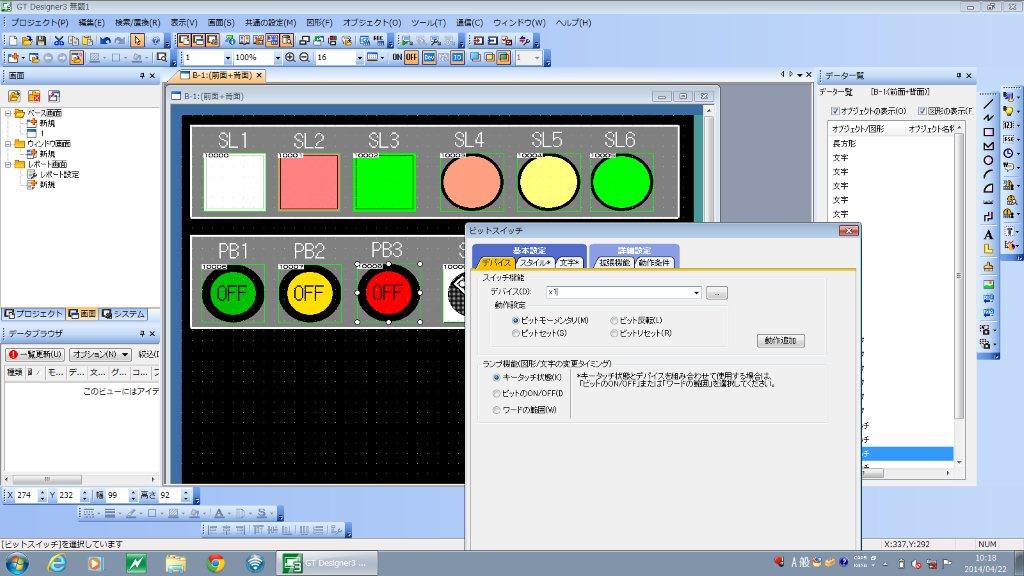 | |  | |  |
|---|---|---|---|---|
パソコンの専用アプリにより、タッチパネルの使用方法を学びます。 | タッチパネルの入力信号をPlcが取り込み、判断して、自動制御回路を実行します。 | 自動制御ラインの実習機のプログラムを行ないます。 |
5.ロボットティーチング実習(基礎)
 | |  | | 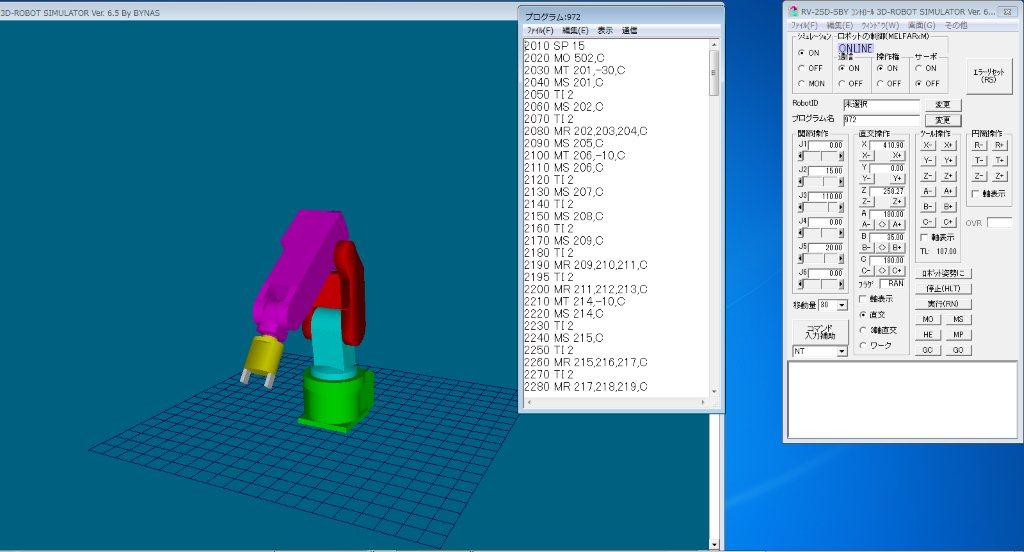 |
|---|---|---|---|---|
本校にある6軸ロボットです。 | ロボットに任意の動きを行わせるため、初めにロボットに位置情報を与えるところから始まります。 | ティーチングが終わると、次にロボットを動かすためのプログラミングを行います。 | ||
動画 | 動画 | 動画 |
6.ロボットオペレーション実習
ロボットオペレーション実習では、より実践的なロボット操作や自動制御機器とのリンク方法などを学びます。
シーケンサとロボットをCC−Linkにより通信制御し、実践的な技術を学びます。
 | | 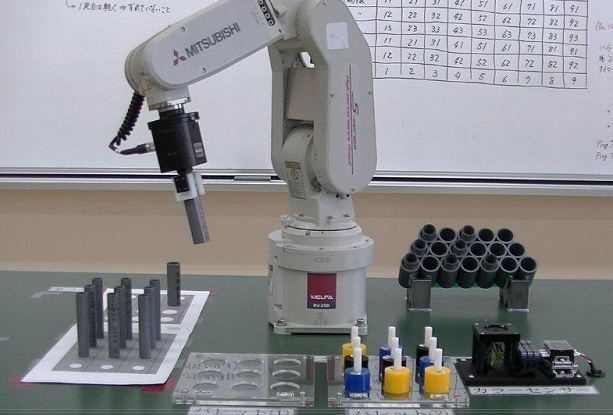 | |  |
|---|---|---|---|---|
ロボットと自動制御機器を組み合わせた実習です。センサーの信号によりロボットが動作を判断しています。 | 実務作業で求められる複雑な動きを取り入れた実習です。 | こんなことも(笑) | ||
| 動画 | 動画 | 動画 |
7.電子回路組立実習および測定実習
LED点滅回路などの、基本的な テスターや、デジタルオシロスコープなどの測定機器の使い方を学びます。 | 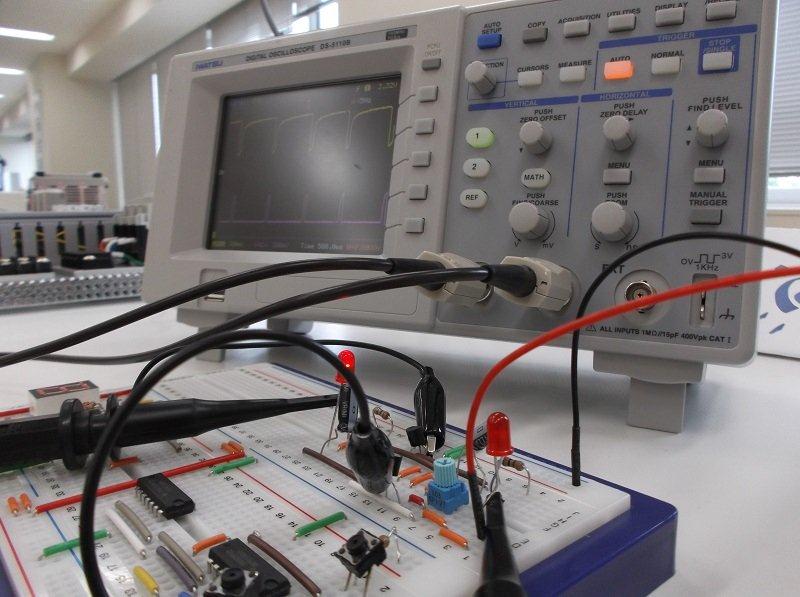 |
|---|
8.ACサーボモータ制御、パルスモータ制御実習
位置決め制御をする上で必要となるACサーボや、パルスモータに関する知識および制御方法について学びます。 | 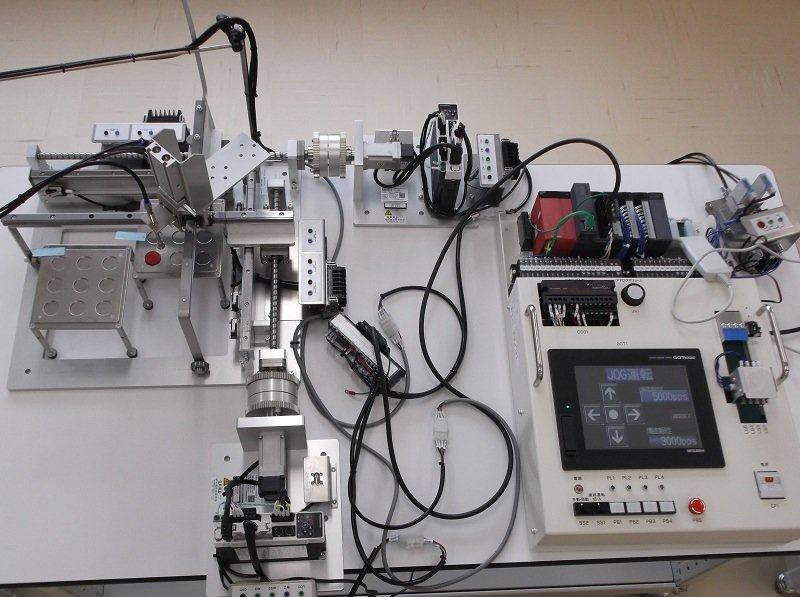 |
|---|
9.自動システム設計のグループワーク実習
1グループ4、5名程度で行います。 | 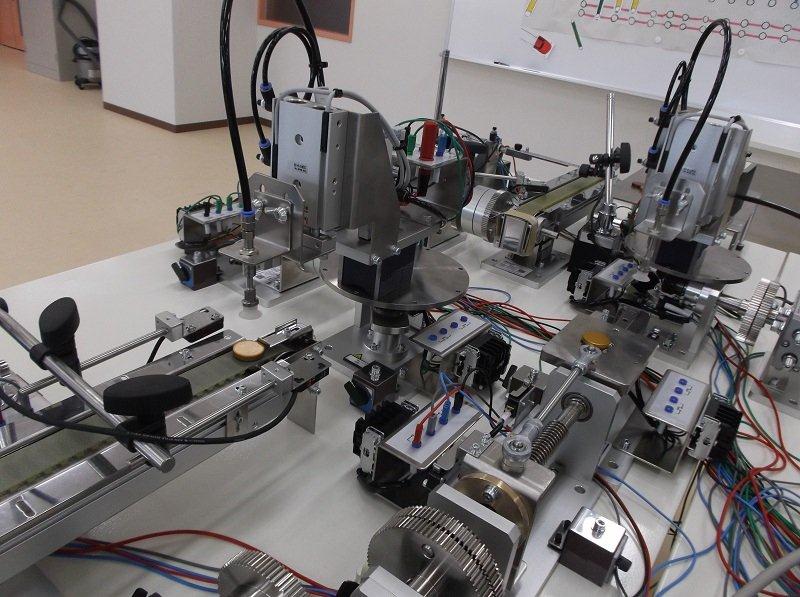 |
|---|
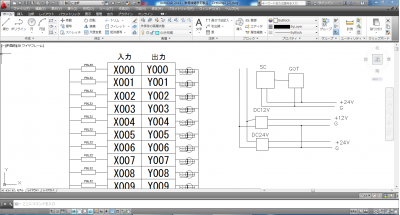
10.CAD実習(基礎)
AutoCADを用いて、 |
|
|---|
11.応用実習
ワークトレーニング科との共同企画で、反射神経をきたえる”モグラたたきゲーム”を作りました。 タッチパネルの画面や、点灯時間と消灯時間など、詳細な仕様を決めていきます。 正解・不正解の電子音や、個人の成績をどうするか、それぞれの発想力が試されます。 |  |
|---|
訓練に関する職種と仕事内容
職種名
生産技術者、制御技術者、PLC制御、自動制御技術者、電気電子技術者、ロボットオペレータ
自動制御技術者の仕事内容
電子部品、デバイス製造業、電気機械器具製造業において、
電気制御回路の設計(PLCラダー作成)及び配線と、産業ロボットのティーチングを行います。
訓練により就職可能な主な仕事
電気制御全般業務
FAソフトエンジニア
PLCプログラマ
制御設計
産業ロボットティーチング
自動化・省力化設備の設計・製作・保全
システムエンジニア
電気機械器具製造業
受講生の入校前の職種と終了後に就職した職種の例
(前職) | (修了後) |
任意に取得可能な資格
1.訓練を修了した際に取得できるもの
・産業用ロボットの教示等の業務に係る特別教育
・産業用ロボットの検査等の業務に係る特別教育
・低圧電気取扱者特別教育
2.訓練中に外部試験を受験
・QC検定(2級から4級) 試験日:9月中旬または3月中旬
・第二種電気工事士 試験日:6月上旬(学科)、7月上旬(実技) ※学科試験対策は授業で、実技試験対策は就職支援講座にてサポートします!
※過去3年分の資格合格率について (ロボテックオートメーション科のみ)
・QC検定(品質管理検定)
| 令和元年度 ※感染症の影響により中止 | 令和2年度 (3月受験) | 令和3年度 (3月受験) | ||||||||||
級別 | 2級 | 3級 | 4級 | 2級 | 3級 | 4級 | 2級 | 3級 | 4級 | |||
受験者数 | - | - | - | 0 | 12 | 0 | 0 | 5 | 0 | |||
合格者数 | - | - | - | 0 | 12 | 0 | 0 | 5 | 0 | |||
合格率 | - | - | - | 0% | 100% | 0% | 0% | 100% | 0% | |||
・第二種電気工事士
令和元年度 試験区分 筆記 実技 筆記 実技 筆記 実技 受験者数 - - 11 10 5 4 合格者数 - - 10 9 4 4 合格率 - - 91% 90% 80% 100%
※感染症の影響により中止令和2年度
(上期受験)令和3年度
(上期受験)
3.訓練修了後に受験可能
・技能検定2級(電子機器組立)
※詳しくは、各都道府県職業能力開発協会にお問い合わせください。
就職率
100% (令和3年度 修了生実績)
100% (令和2年度 修了生実績)
92.9% (令和元年度 修了生実績)
修了生の主な就職先
求人企業名 | 場所 | 事業内容 |
|---|---|---|
| ビーンズユー 株式会社 関西セイキ工業 株式会社 島田化成 株式会社 枚方太陽 株式会社 アクテック 株式会社 株式会社 ユニテック 日工 株式会社 株式会社 武蔵野(京都工場) 株式会社 武蔵野(大阪工場) 株式会社 エムシステム 有限会社 ウィルデザイン | 吹田市 | FA制御の設計、製造、検査、システム構築 医療関係の省力化機器の開発・設計・製造 産業用洗浄装置の設計・製造・販売 各種生産ラインシステム等の製作・開発・企画・販売など アルミケース等の製造・販売・設計・開発など 自動制御システム(産業用ロボット等を使用)の設計・製作 建築機械の製造・販売 大手コンビニチェーンの弁当、調理パン等の製造システムの設計 大手コンビニチェーンの弁当、おにぎり、調理パン等の製造・販売 産業用ロボットによる自動化システムの設計 省力化設備自動機械、制御盤(PLC等)のハード設計 |
授業風景
|
|
|---|---|
有接点シーケンス(学科) | シーケンスプログラム実習 |


|
|
|---|---|
ロボット操作実習風景(1) | ロボット操作実習風景(2) |


|  |
|---|---|
ブレッドボードで組んだ電子回路の測定実習 | グループワーク実習 |

企業見学
|
|
|---|---|
分かりやすい資料で、溶接について学びました | ショールーム見学の様子 |
|
|
5台のロボットが同期し、溶接を行うデモの様子 | ロボットの操作体験 |




企業による出張講習
・実施日 平成31年1月31日(木曜日)
株式会社コガネイ様による出張講習を、北大阪校内にて実施していただきました。
エアシリンダ(圧縮空気を使った駆動装置)の原理や仕組みについて、テキストや
実習機器を使って学ぶことができました。
100ページ程ある初級テキストは、詳しい構造や原理などがあり、盛りだくさんな内容でした。
また、限られた時間で、要点を丁寧に説明してくださり、訓練生からの質問にも分かりやすく解説していただきました。
本校でも、エアシリンダを使用した制御機器を使用しているので、
今回の講習会で学んだ内容を活かしながら、更なる学習を進めていきたいと思います。
|
|
講座の様子 | 限られた時間の中で丁寧に説明していただきました |
|
|
実習キットの中身 | 圧縮空気を送る配管をつなげて動作を確認しました |

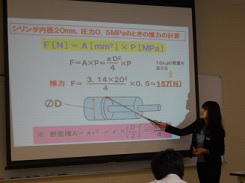

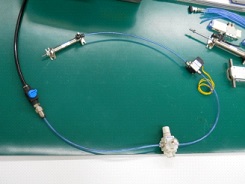
・実施日 平成31年2月27日(水曜日)
SMC株式会社様による出張講習を、北大阪校内にて実施していただきました。
空気圧制御に関する講習を行っていただきました。
前半は、座学による説明、後半は実習機器を使用しながら動作内容の確認を行いました。
実習機器には、様々な種類のソレノイドバルブがあり、各ソレノイドの動作の違いを勉強しました。
※ソレノイドバルブ⇒電気の入り切りにより、空気の流れる方向を変えることができる機器
このソレノイドの動作により、圧縮空気の流れる方向を変えることで、例えばエアシリンダを前方に出したり、引いたりすることができます。
就職先でも、空圧機器を使用する機会が頻繁にありますので、これまでの講習会で学んだ基本を元に、更なる学習を図りたいと思います。
|
|
講座の様子 | 実習装置の外観 |
|
|
切り替えボタンを使い、 | 配管をソレノイドバルブや機器につなげます |




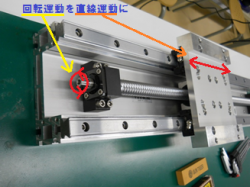
・実施日 平成31年1月25日(金曜日)
THK株式会社様によるLMガイドの技術講習会を実施していただきました。
外力や、モーターの回転運動を直線運動に変換する装置、LMガイド(=Linear(直線) Motion(運動) Guide(案内))を
分解して、中の構造を知り原理や仕組みを学びました。
中にボールねじが入っており、軽い力で重たいモノを搬送することができます。
人が上に乗っている状態で、他の人が外から押すと簡単に動きました。
目に見えない様々な場所で使われており、用途に応じてたくさんの種類があります。
就職先でも目にする機会が多くあると思いますので、今回の講習をしっかり復習しておきたいところです。
|
|
講座の様子 | ボールねじにより回転運動を直線運動にします |
|
|
分解の方法や調整方法など実演を | 熱心にメモを取っています |



・実施日 平成30年4月10日(火曜日)
オリエンタルモーター株式会社様によるステッピングモーターの技術講習会を実施していただきました。
1人1台の実習機を用いて、ステッピングモーターに関する知識・技術を学びました。
講習では、まず座学で基本を学び、その後、実習機を用いて原理について学びました。
ステッピングモーターは、細かい角度でモーターを動かすことができる機器です。
モーターの性能によって異なりますが、実習で使用した機器は0.72°刻みで動かすことができます。
(500回、0.72°の角度を刻むと、1周 360°となります。)
物体の位置を正確に止めたい制御(位置決め制御)などで使用され、自動制御の分野では欠かせない技術となります。
|
|
講座の様子 | ステッピングモーター実習機と操作マニュアル |
|
|
操作をしながら仕組みを学びました | デモ機器の展示 |




このページの作成所属
商工労働部 北大阪高等職業技術専門校 訓練課
ここまで本文です。

© Copyright 2003-2024 Osaka Prefecture,All rights reserved.